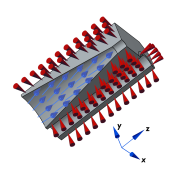
The 2D physics interface for plane stress allows loads in the x and
y directions, and assumes that these are constant throughout the material’s thickness, which can vary with
x and
y. The plane stress condition prevails in a thin (compared to the in-plane dimensions) flat plate in the
xy-plane loaded only in its own plane and without any
z direction restraint.
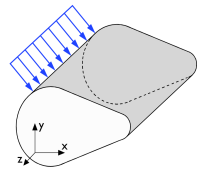
Loads in the x and
y directions are allowed. The loads are assumed to be constant throughout the thickness of the material, but the thickness can vary with
x and
y. Formally, the plane strain conditions require that the ends of the object are constrained in the
z direction, but it is often also used for central parts of an object that is long in the
z direction (compared to the in-plane dimensions). One example is a long tunnel along the
z-axis where it is sufficient to study a unit-depth slice in the
xy-plane.
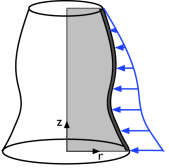
In the default version of the interface, displacements occur only in the rz-plane, and there are two degrees of freedom,
u and
w. By selecting the
Include circumferential displacement option, you can model also torsion around the axis of rotational symmetry. The azimuthal rotation degree of freedom
v is then included. In addition, many features such as loads, allow values to be entered in the
φ direction.
The 2D axisymmetric geometry is viewed as the intersection between the original axially symmetric 3D solid and the half plane φ = 0,
r ≥ 0. Therefore, the geometry is drawn only in the half plane
r ≥ 0, and the original 3D solid is recovered by rotating the 2D geometry about the
z-axis.
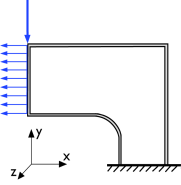
The geometry is a line, and the degree of freedom (dependent variable) is the displacement u in the global
x direction. Plane stress, plane strain, or generalized plane strain assumptions can be used. The out-of-plane formulation can be selected independently in the
y and
z directions.
The generalized plane strain assumption adds one global variable for the additional strain in the y or
z direction, and the corresponding transverse strain component can vary linearly throughout the cross sectional area.
The geometry is a line, which represents a disk because of the axial symmetry. The line is drawn only in the half plane r ≥ 0. Displacement occurs only in the radial direction, and there is one degree of freedom,
u, the displacement in the global
r direction.