For a particle of velocity v (SI unit: m/s) in a fluid of velocity
u (SI unit: m/s), the virtual mass term
Fvm (SI unit: N) is (
Ref. 19)
where mf (SI unit: kg) is the mass of the fluid displaced by the particle volume,
dp (SI unit: m) is the particle diameter, and
ρ (SI unit: kg/m
3) is the density of the fluid at the particle’s position.
The derivative term in Equation 5-12 is a total derivative or material derivative. Therefore it considers not only the time dependence of the velocity at a fixed point, but also the motion of the particle relative to the fluid. For an arbitrary scalar field
f, the material derivative is defined as
where ∇f becomes a rank 2 tensor. In either case, the dot product is taken with the particle velocity
v instead of the fluid velocity
u, following
Ref. 19.
Since v is the velocity of a discrete particle, not a field variable, its gradient
∇f vanishes, leaving only
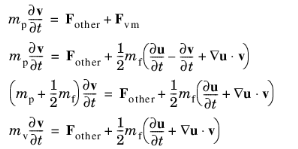
The term involving the time derivative of particle velocity v can be moved to the left-hand side of the equation of motion, by manipulating the equation of motion of a particle as follows:
where mv (SI unit: kg) is the virtual mass,
To summarize, when including the virtual mass force, the particle mass mp on the left-hand side of the equation of motion is replaced with the virtual mass
mv. The contribution of the virtual mass force to the right-hand side then contains only the material derivative of the fluid velocity
u,
However, when the Drag Force feature is active, the above-mentioned simplifications cannot be performed due to the presence of the rotation matrix on the right hand side of the equation of motion. Therefore, when the
Drag Force feature is active, the virtual mass force is treated as another external force, and the particle mass
mp on the left-hand side of the equation of motion is replaced with the virtual mass
mv.