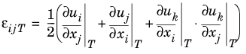
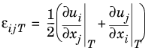
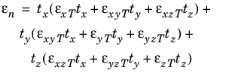
The axial strain εn is calculated by expressing the global strains in tangential derivatives and projecting the global strains on the edge.
where t is the edge tangent vector and
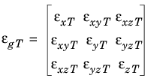
εgT is defined as
For output, the First Piola–Kirchhoff stress Pn is computed from the Second Piola–Kirchhoff stress using
where s’ is the ratio between current and initial length. The axial force in the element is then computed as
where A0 is the undeformed cross-section area. The engineering (Cauchy) stress is defined by
where A is the deformed area of the element. For a geometrically linear analysis, the change in area is ignored, so that
A =
A0.
Starting with the large displacement case, let xd1 and
xd2 be the deformed position of the two endpoints of the edge
where ui is the displacement, and
xi is the coordinate (undeformed position) at endpoint
i. The equation for the straight line through the endpoints is
where t is a parameter along the line, and
a is the direction vector for the line.
a is calculated from the deformed position of the endpoints as
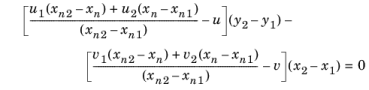
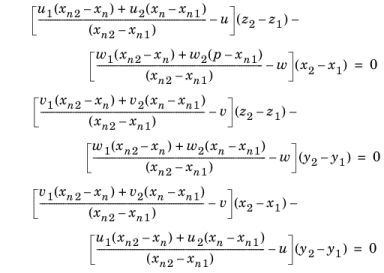
The constraints for the edge are derived by substituting the parameter t from one of the scalar equations in
Equation 10-3 into the remaining ones. In 2D the constraint equations become
where uax is the axial displacement along the edge, and
xn is a linear parameter along the edge
Eliminating uax from
Equation 10-4 results in the following linear constraint in 2D
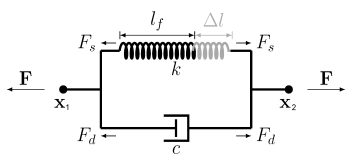
You can use a Spring-Damper Material to connect two points by an elastic spring, a viscous damper, or both. Such springs can be used in any structural mechanics physics interface, by adding a Truss interface. You can then set the degree of freedom names in the two interfaces to the same name, in order to share the same displacement fields.
where X1 and
X1 are the original positions of the two points, and
u1 and
u2 are their respective displacements. The initial spring length,
l0, is
The spring extension Δl is computed as the difference between the current spring length and the free length,
If k depends on the extension, so that the spring is nonlinear, it should be interpreted as a secant stiffness, that is
where c is the viscous damping coefficient. In frequency domain, it is also possible to specify a loss factor
η, and the total damping force will then be
In a time-dependent analysis, the energy dissipated in the damper, Wd, is computed using an extra degree of freedom. The following equation is added:
Here, E is Young’s modulus,
Imin is the area moment of inertia in the weakest orientation of the cross section, and
L is the length of the bar.
K is called the
effective length factor, and can be used to compensate for nonideal end conditions. The value
1 corresponds to the Euler
2 buckling case, in which both ends are pinned.
A failure index exceeding 1 means that the buckling load is exceeded. A set of variables providing different measures of the utilization is listed in
Table 10-1.