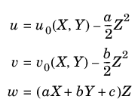
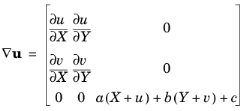
One possible extension of the Plane Strain formulation is to assume that the displacement field depends on the out-of-plane coordinate
Z, but in-plane strains are independent of it.
here, u0(
X,
Y) and
v0(
X,
Y) are the in-plane displacement components; and
a,
b, and
c are constants independent of the
X,
Y, and
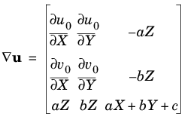
Z coordinates. The gradient of the displacement field then reads:
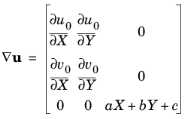
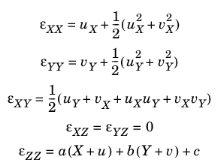
At the cross section Z = 0, the in-plane deformation is fully characterized by the in-plane displacement components
u0(
X,
Y) and
v0(
X,
Y). The displacement gradient then simplifies to
The out-of-plane shear strains are zero, εxz = εyz = 0, and under the assumption of small displacements and rotations the normal strain reads
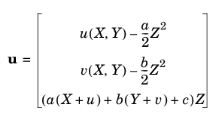
The above conditions differ from the Plane Strain formulation only by the fact that the out-of-plane strain component
εz can vary linearly throughout the cross section.
In COMSOL Multiphysics, the coefficients a,
b, and
c in
Equation 3-8 are modeled as extra degrees of freedom that are constant throughout the model (global variables).
For the 1D representation, only the x-component of the displacement field is considered, and only gradients with respect to this direction are computed, this is,
u =
u(
X),
∂u/∂Y = ∂u/∂Z = 0, and
εxy = εy = 0. It is possible to apply the generalized plane strain assumption to either the
xy-plane, the
xz-plane, or to both planes, in which case the strain components are augmented to
εy = b and
εz = c.
Coefficients a,
b, and
c are assumed to be small. Then, using the above displacement field in the displacement gradient evaluated in the plane
Z = 0 simplifies to
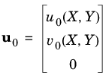
The first term, u0, represents a static in-plane prestress deformation:
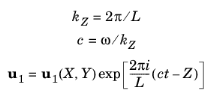
The second part of the solution, u1, presents a time-harmonic linear perturbation with an amplitude that can be a function of the in-plane coordinates
X and
Y. Such a perturbation can be seen as an out-of-plane wave, with a small amplitude that propagates in the
Z direction, a wavelength
L, and phase velocity
c:
Note that in contrast to the prestress solution u0, the perturbation amplitude
u1 can have nonzero values in all the displacement components:
There are two alternative approaches. The wavelength L, and thus the wave number
kZ, can be considered as a parameter. Then,
ω can be computed by an eigenfrequency analysis for the 2D cross section with all three displacement components taken as dependent variables. As a result, one obtains
Thus, the wave speed for the out-of-plane wave is computed as a function of the wavelength L and possible prestress
u0 in the material. The dependence of the wave speed on the wavelength is often called dispersion.
Alternatively, the frequency f (and thus
ω) can be taken as a parameter. Then, the solution can be computed via eigenvalue analysis with respect to the wave number
kZ using the 2D cross section geometry. Hence,
which determine the wavelength L and phase velocity
c for the wave that propagates out-of-plane for a given frequency
f under given in-plane prestress deformation
u0. Such interpretation of the perturbation solution is sometimes called a signaling problem.