Add an Edge to Boundary node to connect a shell edge to a shell boundary in a mesh independent configuration.
If possible, use the Edge to Edge coupling, which involves fewer approximations. The
Edge to Boundary coupling has the advantage that there is no need for having matching edges in the geometry.
This setting is used in conjunction with Local edge system and
Shell Local System. When the connection is used for an edge which is shared between boundaries, the coordinate system can be ambiguous. Select the boundary which should define the edge system. The default is
Use face with lowest number.
For Rigid, the coupling between the two parts is rigid in a pointwise manner. Every point on the destination boundary is coupled by a virtual rigid bar to the nearest point on the source edge. This does not imply that the whole edge is rigid.
For Rigid, select for both the source and destination sides of the connection the
Connected location —
Top surface,
Midsurface (default), or
Bottom surface.
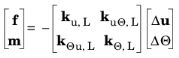
For Flexible, you supply a stiffness matrix, connecting the corresponding points on the source and destination sides. The stiffness coefficients are given per unit length along the edge. Input fields for the matrices
ku,L and
kΘ,L are always shown. Select
Translational-rotational coupling to show input fields for the coupling matrices
kuΘ,L and
kΘu,L. In 2D axisymmetry, most elements of these matrices are by definition zero. Only elements which can be nonzero are shown; these are elements 13 and 23 for
kuΘ,L, and elements 31 and 32 for
kΘu,L.
Here, f and
m are the forces and moments per unit length acting on the destination side, and
Δu is the difference between the destination side displacements and the source side displacements. Similarly,
ΔΘ is the difference between the destination side rotations and the source side rotations. All vectors are expressed in the selected coordinate system.
Optionally, you can enter a Mass per unit length,
ρu,L. This can for example be the mass of a not modeled weld.
On the boundary, a strip with a certain width is used for the connection. Select a Connected area defined by —
Shell thickness or
Distance from shell midsurface to control the width of the strip. The default is
Shell thickness, in which case the thickness of the shell on the source side (the edge) is used as the connection width. By choosing
Distance from shell midsurface enter the desired width.
To display this section, click the Show More Options button (

) and select
Advanced Physics Options in the
Show More Options dialog box. The information in this section i sonly used if
Method is set to
Rigid.