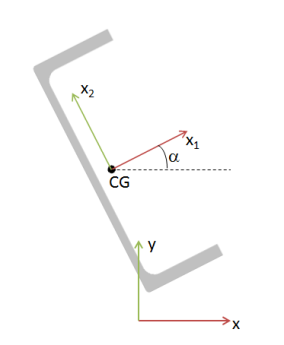
The angle needed to rotate the x-axis to the axis of the largest principal moment of inertia (
x1) is denoted
α. From the definition of Mohr’s circle, the angle is
When implemented using the atan2 function, the angle can be correctly evaluated for all rotations, and returns in the interval
−π < α < π.
The following notation is used:  . This is a shear stress in the x2
. This is a shear stress in the x2 direction (acting on the plane with
z as normal) caused by a unit shear force acting in the
x1 direction.
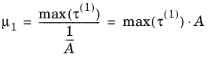
The max shear stress factor is the ratio between the maximum shear stress in the cross section and the average shear stress. For a shear force in the
x1 direction, the definition is
The shear correction factor is also computed. The shear correction factor is a multiplier which makes the strain energy from the average shear stress and shear strain in the cross section equal to the true shear energy in the cross section. The shear correction factor can be introduced through the concept
shear area. The shear area is the reduced area which should replace the true area when computing the shear deformation of a beam. In terms of the shear correction factor it can be written as
where κ1 is the shear correction factor for a shear force in the
x1 direction. Thus, for a shear flexible beam, the constitutive relation for the average shear is
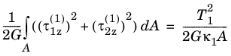
Since T1 is a unit shear force, the shear correction factor can be computed as
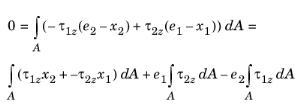
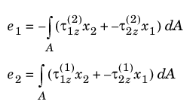
The shear center (or, equivalently, the
center of rotation) is the point around which the shear stresses from bending has no torque. In COMSOL it is represented as the distance from the center of gravity of the cross section in the principal axes coordinate system. The torque can be computed as
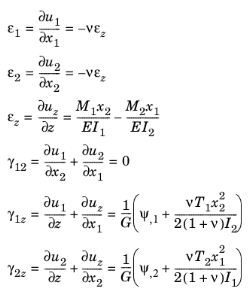
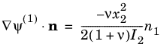
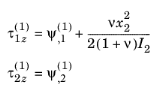
The two first equations simply state that the shear stresses are independent of z, whereas the third equation is the one on which to focus the interest. Assume that the shear stresses can be derived from a scalar stress potential,
ψ, through:
Given the stress state from Equation 9-1, the only two nontrivial equations are
Integration of the first equation with respect to x1 and the second equation with respect to
x2 gives
This is the same equation as Equation 9-2. It is thus possible to fulfill equilibrium, compatibility, and the constitutive relation with a single equation of Poisson type.
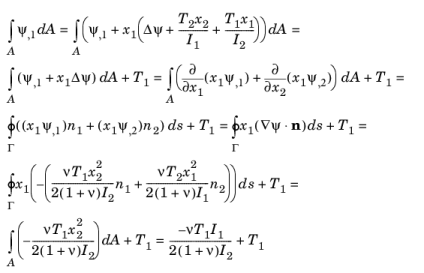
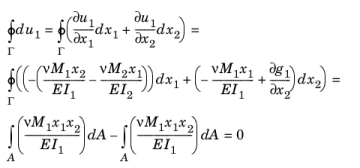
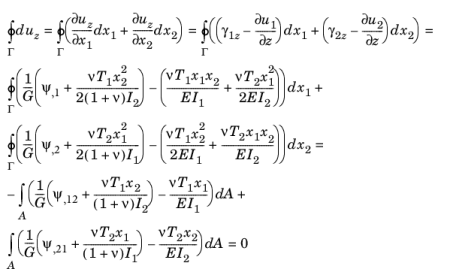
To compute the integral of the x1-derivative of
ψ, a term containing the differential equation itself is added. This is a zero contribution, but it makes further simplifications possible.
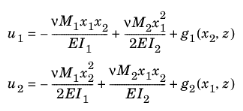
In the last step of Equation 9-3, all integrals are zero since the coordinate system is located at the center of gravity of the section. This proves that all displacement components are unique.
where ϕ is the stress function. For a singly connected region the boundary condition is
ϕ = 0 along the whole boundary. Having solved this problem, the torsional rigidity can be computed as
In the case that there are internal holes in the section the situation is slightly more complex. The ϕ = 0 condition is now applicable only to the external boundary, whereas each boundary of an internal hole
i needs a Dirichlet boundary condition:
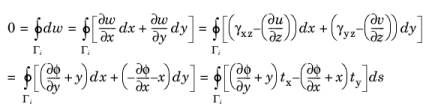
where Hi is a constant to be determined. The constant value of the stress function fulfills the stress-free boundary conditions. There is also a compatible condition that must be fulfilled: the displacements must be single valued when going around each hole along its boundary
Γi. This is trivially fulfilled for the in-plane displacements, but the out-of-plane displacement,
w, generates the necessary equations to determine
Hi:
The gradient of ϕ depends linearly on the yet unknown variables
Hi, the values of which can be solved by adding one equation,
The warping function ω(x, y) describes the out-of-plane deformation related to torsion. It fulfills Laplace’s equation
Δω = 0.
The offset by the shear center coordinates (ex,
ey) is introduced because the torsion theory assumes that the coordinate system has its origin in the center of rotation (which is the same as the shear center).
The warping displacement, u, for a beam with unrestrained warping can be computed by providing the twist of the beam,
ϕxl as input:
where B is the bimoment. The maximum axial stress is