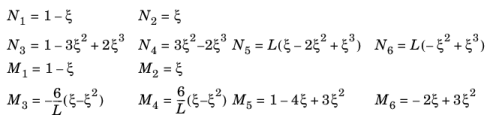
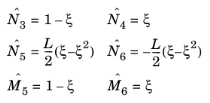
where L is the length of the beam element.
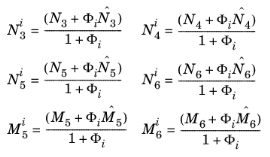
The superscript i indicates that the shape functions for bending are no longer the same in the two principal directions. The shape functions with
i = 2 are used for bending in the local
y direction, and the shape functions with
i = 3 are used for bending in the local
z direction.