Consider a rotor as observed in a space-fixed frame. Let the initial position of a material point be denoted by X. Since the rotor rotates about its axis, the position of the material point
X changes in time, even if the rotor is not undergoing any deformation. The current position
xR of the material point
X without deformation is thus given by
where Xbp is a point located on the axis of rotation,
R(
t) is the rotation matrix due to the axial rotation. When also including the deformation, the current position
x of the material point
X is given by
where u(
xR(
t),
t) is the displacement of the point at
xR(
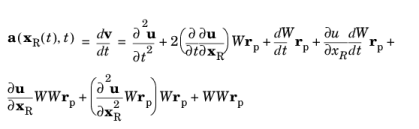
t) as observed in the space-fixed frame. The velocity of this point can be expressed as
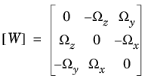
Here, W is a skew-symmetric tensor corresponding to the angular velocity vector
Ω, defined as
The components of the skew-symmetric tensor W in terms of components of angular velocity vector are given as
Thus, the tensor W operating on a vector has the same effect as taking the cross product of
Ω with the same vector.