Using a Rigid Body Contact node, it is also possible to model the structural contact between a spherical source and arbitrarily shaped boundaries of rigid or elastic bodies. In the case of irregular shaped boundaries, contact is detected only at the point closest to the source body. In case of multiple points having the same distances from the source center to different destination boundaries, only one point is in the contact formulation.
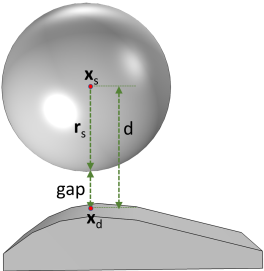
Here, rs is the radius of source sphere.
Here, Xsrc is the undeformed location of the source center,
xdst is the spatial position vector of the closest point on the destination boundaries, and
usrc is the displacement of the source center.