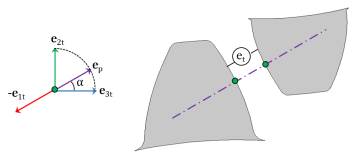
The transmission Error node can optionally be added on gear pairs. In this node, the static transmission error can be specified and added in the rotation constraint of the gear pair. By default, there is no transmission on the gear pair and it is assumed to be an ideal pair.
where ewh and
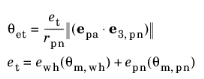
epn are the wheel and pinion transmission errors, respectively.
In Equation 3-2, ewh and
epn are written as a function of respective mesh cycle. However, it is also possible to write them individually as a function of a full revolution.
Similarly, it is also possible to directly specify et as a function of the mesh cycle and a full revolution of a wheel or pinion.