|
•
|
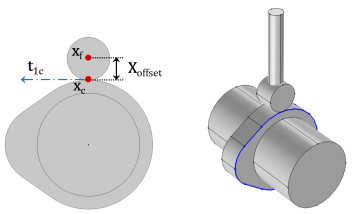
xf is the spatial position of the follower point.
|
|
•
|
xc is the spatial position of a closest point on the cam edges.
|
|
•
|
|
•
|
Xoffset is the initial offset or gap vector between the follower point and cam edges.
|
|
•
|
|
•
|
Rc is the rotation matrix of the cam.
|