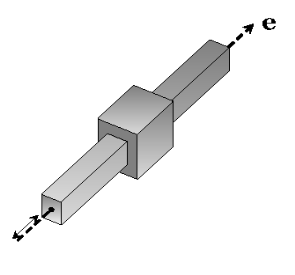
The Prismatic Joint, also known as a translational or sliding joint, has one translational degree of freedom between the two connected components. The components are free to translate, or slide, relative to each other along the joint axis.
In Method 3, the direction that has a positive projection on the global x-axis is selected. If the projection on the
x-axis is very small (the edge is almost perpendicular to the
x-axis), then the
y-axis is used in the projection criterion. If the edge is perpendicular also to the
y-axis, then the
z-axis is used as the joint axis. You can also choose to reverse the direction of initial joint axis.
The initial second axis (e20) (perpendicular to the initial joint axis) is computed by making an
auxiliary axis (
eaux) (an axis not parallel to the initial joint axis) and then taking a cross product of the initial joint axis and this auxiliary axis:
The initial third axis (e30) is computed by taking a cross product of the initial joint axis and the initial second axis:
For 2D models, the generation of the coordinate system is significantly simplified. The initial third axis (e30) is taken as the out-of-plane axis (
ez). The initial second axis (
e20) is orthogonal to (
e10) and (
e30):
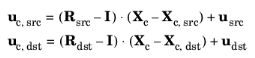
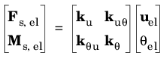
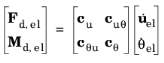
The displacement vector (u) and quaternion vector (
b) for the source and destination attachments are defined as:
where ϕ is the rotation about
z-axis (out-of-plane axis).
Here, u2,
u3,
θ1,
θ2, and
θ3 are the default elastic degrees of freedom available for this joint. Optionally, only a subset of them can be chosen to be elastic.