|
•
|
Use tolerance to terminate the iterations when the estimated relative error is smaller than a specified tolerance. Then enter the Maximum number of iterations to limit the number of iterations. When the maximum number of iterations have been performed, the auxiliary-space AMG solver is terminated even if the tolerance is not fulfilled.
|
|
•
|
Fixed number of iterations to specify the number of iterations of the auxiliary-space AMG solver in the Number of iterations field. The default is 2.
|
|
•
|
Iterations or tolerance to terminate the auxiliary-space AMG solver iterations when the estimated tolerance is smaller than a specified tolerance or after a specified number of iterations, whichever comes first. Then enter the Number of iterations to specify a fixed number of iterations to perform and a tolerance to use in the Relative tolerance field (default: 0.1).
|
|
•
|
In the Number of iterations field, enter the desired number of iterations (default: 1).
|
|
•
|
Select a Multigrid cycle: V-cycle (the default), W-cycle, or F-cycle. For Multigrid cycle, the settings are the same as for the geometric multigrid (GMG) and algebraic multigrid (AMG) solvers.
|
|
•
|
Enter the Number of multigrid levels to generate (the default is 1 for Geometric multigrid and 5 for Algebraic multigrid).
|
|
•
|
Enter a Maximum number of DOFs at coarsest level. The default is 5000. Coarse levels are added until the number of DOFs at the coarsest level is less than the max DOFs at coarsest level or until it has reached the number of multigrid levels.
|
|
•
|
Enter a Minimum number of DOFs per thread on multigrid levels (default: 5000) to control the size of the computation threads on a multicore computer.
|
|
•
|
Enter a value for the Strength of connections is a positive number, typically between 0.25 and 0.75 (default value: 0.25). This is a strength threshold used to determine the relation of strong influence dependence between the points. There is some indication that you should use a lower number, such as 0.25, for problems with denser matrices, whereas for other problems with sparser matrices you should use larger values, such as 0.75.
|
|
•
|
The Sparser prolongator check box is selected by default. When interpolating the value of the error in a specific fine point “i”, only the coarse points that strongly influencing “i” are used. If you clear the check box, all the coarse points that are influencing “i” are used.
|
|
•
|
Use the Prolongator truncation factor (default: 0.1) to control the fill-in of the prolongator. Small elements from the prolongator are removed. More precisely, let P denote the prolongator and M the truncation factor, the element pij is removed if
|
|
•
|
The aggregation algorithm is based on a connection criterion, which you specify as a coefficient in the Strength of connections field. A node j is connected to another node i, if
|
|
•
|
From the Null-space vectors list, choose Constant (the default) or Rigid body modes. For linear elasticity problems, always select Rigid body modes because it enhances the convergence properties significantly.
|
|
•
|
Select the Compact aggregation check box to use an aggregation algorithm that forms, on average, smaller aggregates, which leads to a less rapid coarsening.
|
|
•
|
Choose how to control the prolongator smoothing using the Smoothing list, which is active when the Prolongator smoothing check box (selected by default) is selected. The Auto option postpones the smoothing for sdim-1 levels, where sdim is the space dimension of the problem. If you choose Manual, enter the level to start smoothing at in the Start smoothing at multigrid level field.
|
|
•
|
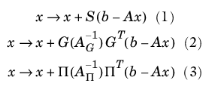
The final transfer operator, P, between the fine and coarse problems are smoothed by one application of Jacobi smoothing:
|
|
•
|
By default, the Use filtering check box is selected. Filtering means that entries in the stiffness matrix have been dropped if they correspond to degrees of freedoms on a node that has no strong connections. Loosely speaking, filtering highlights anisotropy in the problem and results in a sparser coarse level problem.
|
|
|
The Variables list used in with the Vanka smoother is the same as the Variables list that otherwise appears in the General section; that list is therefore not visible in this case
|