Use a Spherical System (

) to define a spherical coordinate system in 3D by its origin, zenith axis, and azimuth axis.
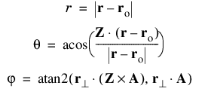
The coordinates of a local spherical coordinate system are (r,
θ, φ), where
r represents the radial distance from the origin,
θ is the inclination (in the interval from 0 to
π), and
φ is the azimuthal angle (in the interval from
−π to
π). Specify — in terms of the global Cartesian coordinates
x,
y, and
z — the position of the origin, the axis
θ = 0 (the zenith axis,
Z), and the axis
θ = π/2, φ = 0 (the azimuth axis,
A). The direction vectors are automatically normalized.
where ro is the position of the origin,
Z is a unit vector along the axis
θ = 0, and the component of
r − ro in the plane
θ = π/2 is
If this coordinate system is added as a subnode to a Combined System node, define where it will be active using a selection in the
Geometric Entity Selection section. Also, the
Name and
Coordinate names fields and the
Frame list are not available in this case.
The Frame list is the same as for the
Cylindrical System.
Under Coordinate names, the default coordinate names appear in the
First,
Second, and
Third columns —
r,
theta, and
phi. Change these names if desired.
Enter the location of the Origin in the global Cartesian coordinate system. The default is an origin coinciding with that of the global system.
Enter the Direction of axis θ=0 (the
zenith axis). The default axis direction is the
z direction in the global Cartesian system.
Define the Direction of axis θ=π/2, φ=0 (the
azimuth axis). The default direction is the
x direction in the global Cartesian system.
From the Work plane list, select
xy-plane (the default, for a standard global Cartesian coordinate system) or select any work plane in the geometry sequence. If you choose a work plane, the work plane’s coordinates
xw,
yw, and
zw are used for the definition of the origin and axis.