Define a Base Vector System (

) using a set of base vectors to form a coordinate system. The system does not necessarily need to be orthonormal, but when it is, declaring it orthonormal and linear enables simplifications that improve performance.
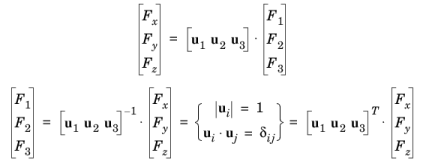
A vector F is represented by its contravariant components
[F1, F2, F3]T in the base of the new base vector system defined by the base vectors
u1,
u2, and
u3 on the form
F = F1u1 + F2u2 + F3u3. Expressing the base vectors as components in another system (for example, the global spatial system
[ex, ey, ez]) gives the transformation matrix between bases:
If this coordinate system is added as a subnode to a Combined System node, define where it will be active using a selection in the
Geometric Entity Selection section. Also, the
Name and
Coordinate names fields are not available in this case.
In the Coordinate Names table, the default names appear under
First,
Second, and
Third —
x1,
x2, and
x3, respectively. In planar 2D models,
x1 and
x2 are typically the in-plane coordinates, and
x3 is the out-of-plane coordinate. Click the table cells to edit the names.
For some applications, only orthonormal coordinate systems can be used. Because the base vectors entered in a Base Vector System node are not necessarily orthonormal, these systems are by default not allowed in contexts requiring orthonormality. To make the coordinate system available in such contexts, select either the
Assume orthonormal check box or the
Make orthonormal check box. The former instructs automatic variable transforms to use the entered
Base vectors directly but treat them as orthonormal — if they are not, results will be incorrect. The
Make orthonormal check box enables a polar decomposition of the base vector matrix into a rotation matrix and a stretch matrix. The rotation matrix — which is orthonormal — is kept, while the stretch matrix is discarded. This procedure is computationally more expensive than assuming orthonormality but guarantees a truly orthonormal transformation matrix that will behave correctly in subsequent variable transforms.
Specify the location of the Origin of the base vector coordinate system in the global Cartesian system. The default is an origin coinciding with the one from the global system using the frame chosen from the
Frame list (default:
Spatial).
From the Work plane list, select
xy-plane (the default, for a standard global Cartesian coordinate system) or select any work plane in the geometry sequence. If you choose a work plane, the work plane’s coordinates
xw,
yw, and
zw are used for the definition of the base vector.