where v is the velocity vector in the rotating coordinate system,
r is the position vector, and
Ω is the angular velocity vector. The relation between
v and the velocity vector in the stationary coordinate system is
The Rotating Machinery, Fluid Flow interfaces solve Equation 3-242 and
Equation 3-243, but reformulated in terms of a nonrotating coordinate system; that is, they solve for
u. This is achieved by invoking the
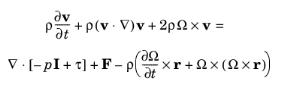
Arbitrary Lagrangian–Eulerian Formulation (ALE) machinery. In rotating domains,
x = x(Ω, t) as prescribed in the Rotating Domain under Definitions. The Navier–Stokes equations on rotating domains then read
The derivative operator ∂ρ/∂T is the mesh time derivative of the density and appears in the equation view as
d(rmspf.rho,TIME). Analogously,
∂U/∂T is the mesh time derivative of the velocity. The variable
TIME replaces
t as the variable for time.
The user input for a rotating domain prescribes the angular frequency, w. To calculate
Ω, the physics interfaces set up an ODE variable for the angular displacement
ω. The equation for
ω is
Ω, is defined as
w times the normalized axis of rotation. In 2D, the axis of rotation is the
z direction while it in 3D is specified in the Rotating Domain features. If the model contains several rotating domains, each domain has its own angular displacement ODE variable.