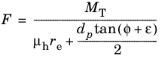
The total required torque, MT, is to a large extent determined by frictional losses. It can, however, be shown that it is directly proportional to the axial force in the bolt,
F.
Here, μh is the coefficient of friction under the bolt head (or nut, whichever is rotating), and
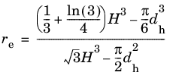
re is an effective radius at which the circumferential force can be considered as acting. If the contact pressure under the bolt head is assumed to be constant, then the effective radius can be computed as
Here, r is the distance from the bolt axis, and the integrals are taken over the contact area under the bolt head.
where do is the outer diameter of the bolt head, and
dh is the bolt hole diameter.
Here, H is the width (spanner size) of the bolt.
Here, dp is the mean diameter of the bolt thread.
where l is the lead (expressed in the same units as
dp). This term, which is purely geometrical, gives the relation between torque and bolt force under ideal (frictionless) conditions.
Here, μt is the coefficient of friction in the thread, while
α is half the thread angle.