You are viewing the documentation for an older COMSOL version. The latest version is
available here.
When adhesion is active, it is possible to break the bond between the source and destination boundaries by adding a Decohesion subnode to
Contact. Decohesion modifies the stress vector
f defined by
Adhesion, but does not explicitly add any new contribution to the to the virtual work on the destination boundary. It thus requires an active
Adhesion node.
(3-191)

where d is the damage variable. During crack opening (or shearing), the damage variable grows, resulting in a softening behavior of the interface until it eventually breaks when
d = 1, see
Figure 3-36. If the interface is unloaded, the material follows the linear secant stiffness as defined by the current state of damage. No permanent deformations remain at complete unloading.
The Decohesion subnode implements the second term on the right-hand side of Equation 3-191, while the first term is implemented in
Adhesion. Notice that in the normal direction, damage only applies to separation of the boundaries, hence the normal contact is unaffected by decohesion.
In the displacement-based damage models, the damage variable d is defined using a damage evolution function written in terms of a displacement quantity. Since, in general, the fracture is a combination of mode I and mode II fracture, the model introduces a mixed mode displacement
um as the norm of the displacement jump vector.
where  is and internal degree of freedom that takes the value of um,max
is and internal degree of freedom that takes the value of um,max at the previous converged solution. The damage variable is then defined as a function of
um,max of the form
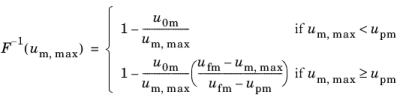
where F-1 is called the damage evolution function and
u0m defines the onset of damage. Conceptually, the damage evolution function is the inverse of the softening branch of the traction separation law
F. Four different definitions of
F-1 are available in the
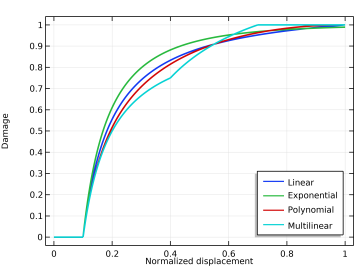
Traction separation law list. These damage evolution functions are summarized in
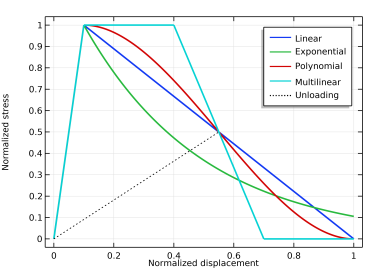
Figure 3-35, and the resulting traction separations laws in
Figure 3-36.
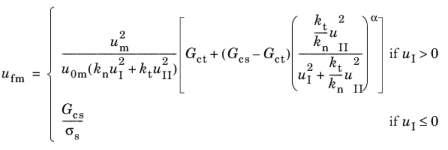
The Linear option specifies a damage evolution function that gives a bilinear traction separation law as seen in
Figure 3-36. It is defined as
where u0m and
ufm define the mixed mode initiation of damage and point of complete fracture, respectively. For the initiation of damage, a linear mixed mode criterion gives
(3-192)
where uI and
uII are the mode I and mode II displacements, respectively. These are obtained from the displacement jump vector
u. The constants
u0t and
u0s are calculated as
(3-193)
where σt is the tensile strength and
σs is the shear strength of the adhesive layer. The normal stiffness
kn and the equivalent tangential stiffness
kt are obtained from the adhesive stiffness vector
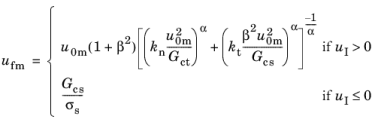
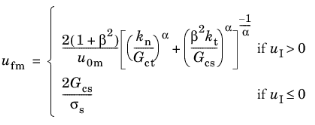
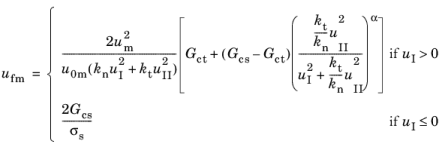
k. The mixed mode failure displacement
ufm depends on the selected
Mixed mode criterion. The
Power Law criterion is defined as
and the Benzeggagh-Kenane criterion is defined as
where Gct,
Gcs and
Gcm are the tensile, shear, and total energy release rates, respectively. The exponent
α is called the mode mixity exponent. From these relations, the mixed mode failure displacement can be calculated. For the power law criterion, the expression is
(3-194)
(3-195)
The Exponential option specifies a damage evolution function that gives a traction separation law which is linear up to the interface strength, and thereafter softens with an exponential curve that reaches zero asymptotically as seen in
Figure 3-36.
The mixed mode damage initiation displacement u0m is defined by
Equation 3-192 and
Equation 3-193. The mixed mode failure displacement
ufm is for the power law again given by
The Polynomial option specifies a damage evolution function that gives a traction separation law that is linear up to the interface strength. and thereafter softens with a cubic polynomial curve as seen in
Figure 3-36.
The Multilinear option specifies a damage evolution function that gives a traction separation law that is linear up to the interface strength. Thereafter a region of constant stress is introduced before the interface softens linearly as seen in
Figure 3-36.
The mixed mode damage initiation displacement u0m is defined by
Equation 3-192 and
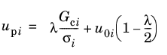
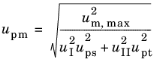
Equation 3-193. The new constant
upm defines the end of the region of constant stress and requires the introduction of the shape factor
λ. The shape factor defines the ratio between the constant stress part of
Gct and the total “inelastic” part of
Gct:
Note that the shape factor is similarly defined for shear and is assumed to be equal for both components. Setting λ = 0 corresponds to the linear separation law. Using the above expression, the stress plateau displacement
upi for the respective component can be expressed as
where index i indicates either tension or shear. For the multilinear option, the mixed mode criterion is always linear (
α = 1). Hence the mixed mode stress plateau displacement and failure displacements are given as
From ψ(
u,
d), the stress vector
f and damage energy release rate
Ydm are obtained as
where  is and internal degree of freedom that takes the value of Ydm,max
is and internal degree of freedom that takes the value of Ydm,max at the previous converged solution. The energy dissipated during the decohesion process is
where Gcm is the critical energy release rate in the sense of fracture mechanics. The overall behavior of the cohesive zone model is then summarized by
where Yd0m defines the damage threshold and
F is a monotonically increasing function of the damage variable. From the above, an expression for the damage variable is obtained as
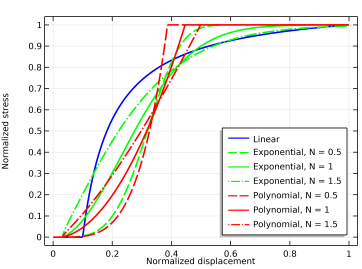
Three different definitions of F-1 are available under the
Traction separation law list for the energy-based damage model. These damage evolution functions are summarized in
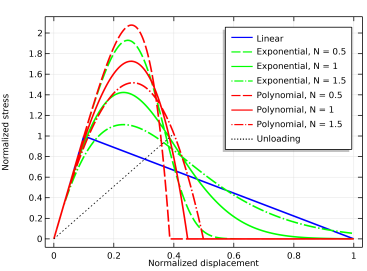
Figure 3-37, and the resulting traction separations laws in
Figure 3-38.
The Linear option specifies a damage evolution function that gives a bilinear traction separation law as seen in
Figure 3-38.
For the linear law, the equation constant Ydfm =
Gcm. The
Exponential option specifies a more general damage evolution function of the following form
where N is a smoothening parameter with a default value equal to 1. The effect of
N on the traction separation curve can be seen in
Figure 3-38. For the exponential law,
Ydfm is defined as
where Γ() is the gamma function. A similar damage evolution function is obtained by the
Polynomial option. It gives a generalized version of the traction separation law proposed in
Ref. 6 of the form
Left to determine are the two variables Yd0m and
Gcm. Their definitions require the introduction of a few new concepts related to the mixed mode loading. First, a mixed mode ratio is introduced
where uI and
uII are the mode I and mode II displacements, respectively. These are obtained from the displacement jump vector
u. The energy release rates of the respective modes are then given by
where G0t and
G0s define the damage threshold in tension and shear, respectively. The corresponding criterion for the fracture toughness is
where Gct and
Gcs are the critical energy release rates for tension and shear, respectively. The variables
α0 and
αc are called mode mixity exponents. Using these mode mixture rules results in
(3-196)
where d is the damage variable obtained from any of the available CZM, and
τ is the characteristic time that defines the delay of the decohesion. If the viscous damage is used to stabilize a rate-independent decohesion problem, the value of
τ must be chosen with care. As a rule of thumb,
τ should at least be one or two orders of magnitude smaller than the expected time step. Too large values of
τ can introduce significant amounts of extra fracture energy to the model, and the actual energy dissipated due to damage can exceed the defined critical energy release rates by orders of magnitude.
where Δt is the current time step taken by the time-dependent solver. The value of the viscous damage at the previously converged step

is stored as an internal degree of freedom.