|
•
|
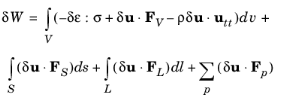
If the study step is geometrically linear, the strain ε is the engineering strain. The stress σ could in principle be any of the stress measures, as they all converge to the same engineering stress in this case.
|
|
•
|
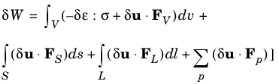
If the study step is geometrically nonlinear, the variation of strain δε is taken from the displacement gradient, and the stress conjugate σ is the first Piola–Kirchhoff stress. The integration
|