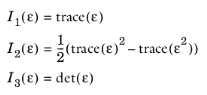
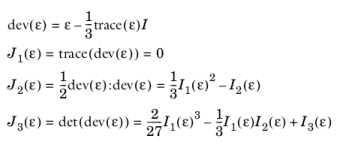
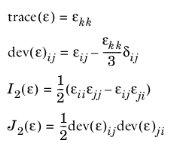
As defined above J2 ≥ 0.
I1 represents the relative change in volume for infinitesimal strains and
J2 represents the magnitude of shear strain.
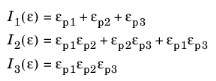
The principal strains are the roots of the characteristic equation (Cayley–Hamilton theorem)
where vk(
x,
t) is the spatial velocity field. It can be shown that
L can be computed in terms of the deformation gradient as
is called the spin tensor. Both tensors are defined on the spatial frame.
The spin tensor Lw(
x,
t) accounts for an instantaneous local rigid-body rotation about an axis passing through the point
x.