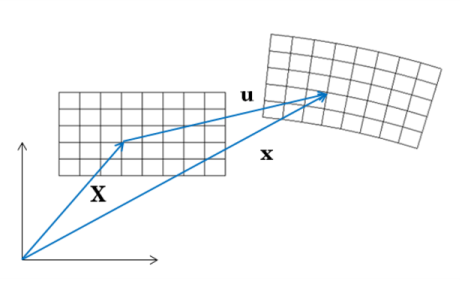
The formulation used for structural analysis in COMSOL Multiphysics for both small and finite deformations is a total Lagrangian formulation. This means that the computed stress and deformation state is always referred to the material configuration rather than to current position in space.
The displacement is considered as a function of the material coordinates (X,
Y,
Z), but it is not explicitly a function of the spatial coordinates (
x,
y,
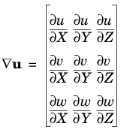
z). It is thus only possible to compute derivatives with respect to the material coordinates.
The deformation gradient tensor,
F, shows how an infinitesimal line element,
dX, is mapped to the corresponding deformed line element
dx by
The deformation gradient F contains the complete information about the local straining and rotation of the material. It is a two-point tensor (or a double vector), which transforms as a vector with respect to each of its indices. It involves both the reference and present configurations.
Here, ρ0 is the initial density and
ρ is the current density after deformation. The determinant of the deformation gradient tensor
F is related to volumetric changes with respect to the initial state. A pure rigid body displacement implies
J = 1. Also, an incompressible material is represented by
J = 1. These are called
isochoric processes.
The determinant of the deformation gradient tensor is always positive (since a negative mass density is unphysical). The relation ρ = ρ0/J implies that for
J < 1 there is compression, and for
J > 1 there is expansion. Since
J > 0, the deformation gradient
F is invertible.