To activate the da and ea coefficients and convert the model into a time-dependent model, select a Time Dependent study.
|
|
To activate the da and ea coefficients and convert the model into a time-dependent model, select a Time Dependent study.
|
|
|
When solving a Time Dependent study step, the time variable is called t and can be used anywhere in equation coefficients. For other study steps, t is undefined. If you want to solve a model that depends explicitly on time using a Stationary study, you must first define a model parameter called t and give it a suitable value.
|
|
|
|
|
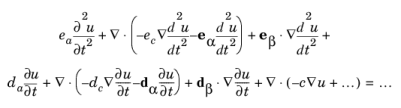
In 1D, add -d_c*uxt-d_al*ut to the γ term, and add -d_be*uxt to the f term, and similarly for second-order derivatives.
|
|
|
In 2D, add -d_c*uxt-d_al1*ut to the first γ component, and add -d_c*uyt-d_al2*ut to the second γ component. Add -d_be1*uxt-d_be2*uyt to the f term, and similarly for second-order derivatives.
|
|
|
Constraints and Dirichlet boundary conditions must not contain time derivatives like ut and utt in the R and r coefficients unless they are enforced weakly, using weak constraints. See Boundary Conditions.
|