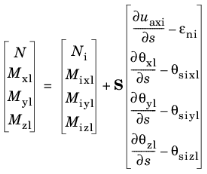
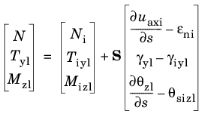
The Section Stiffness node in the Beam interface allows modeling of beams with non-homogeneous cross sections by, instead of geometrical and material properties, directly entering values for the stiffness matrix
S.
including initial normal force Ni; moments
Mixl,
Miyl, and
Mizl; normal strain
εi; and curvatures
θsixl, θsiyl, and
θsizl. Here,
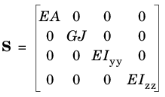
S is a 4 by 4 symmetric matrix. For a homogeneous prismatic beam with isotropic material properties, it is defined as
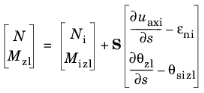
with S now being a 2 by 2 symmetric matrix.
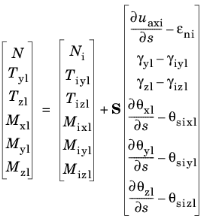
with S being a 6 by 6 symmetric matrix. The equation now also includes the initial shear forces
Tiyl and
Tizl as well as the initial shear strains
γiyl and
γizl.
with S now being a 3 by 3 symmetric matrix.