The rotation of the beam is represented by rotation vectors, θ. The rotation at the midpoint is approximated as the arithmetic mean of the rotations at the nodes,
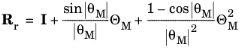
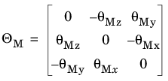
The rigid rotation is then represented by a rotation matrix Rr, corresponding to this midpoint rotation. It is given by
where the local coordinate ξ ranges from 0 to 1, and
Xi denotes original node coordinates.
xM is the midpoint position, computed as the average of the two nodes,
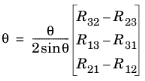
The total rotation vector is computed from a total rotation matrix, R. The total rotation matrix is first composed from the rigid body rotation and the incremental rotation.