In the expressions above, Xc is the coordinate of the center of the journal given by
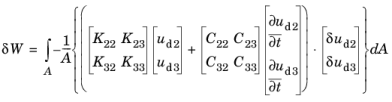
Here, ufd is the displacement field of the foundation in the spatial frame.
in which uf and
θf are the displacement and rotation vectors, respectively, of the bearing foundation at the center of the bearing. The above definition of local displacement and rotation components are valid for the Solid Rotor interface. In a Solid Rotor, Fixed Frame interface the additional transformation with a rotation matrix to convert the rotating frame displacement to a fixed frame displacement is not required.
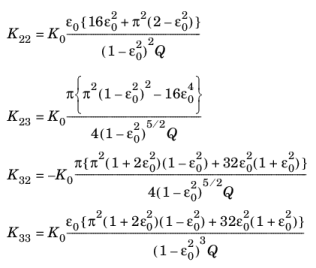
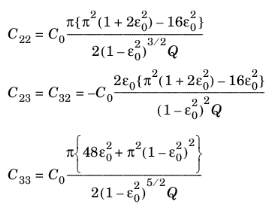
Here, μ is the dynamic viscosity of the lubricant,
Ω is the angular speed of the rotor,
R is the radius of the journal,
C is the clearance between the journal and bushing when both are concentric,
ε0 is the relative eccentricity and is given by
ε0 =
e/
C, and
e is the eccentricity of the journal defined as
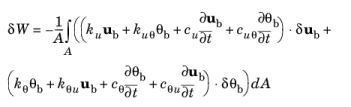
Default values for the inputs kθ and
cθ are provided assuming that
ku and
cu are constants and that the displacement of the journal varies linearly along the axis. The default values for these inputs are