|
|
|
|
1
|
|
2
|
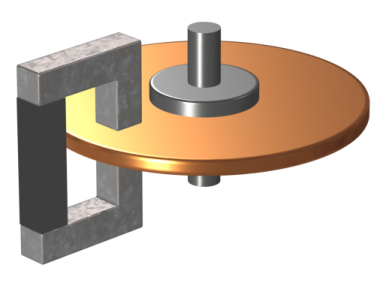
In the Application Libraries window, select ACDC Module>Motors and Actuators>magnetic_brake in the tree.
|
|
3
|
Click
|
|
1
|
|
2
|
|
1
|
In the Model Builder window, expand the Component 1 (comp1)>Magnetic and Electric Fields (mef) node.
|
|
2
|
Right-click Component 1 (comp1)>Magnetic and Electric Fields (mef)>Velocity (Lorentz Term) 1 and choose Duplicate.
|
|
3
|
|
4
|
Specify the v vector as
|
|
5
|
|
1
|
|
2
|
|
3
|
|
4
|
|
5
|
|
1
|
|
2
|
|
3
|
In the tree, select Component 1 (Comp1)>Magnetic and Electric Fields (Mef)>Velocity (Lorentz Term) 1.
|
|
4
|
Right-click and choose Disable.
|
|
5
|
|
6
|
|
7
|
|
8
|
|
9
|
|
10
|
|
1
|
|
2
|
|
3
|
|
4
|
|
1
|
|
2
|
|
1
|
|
2
|
|
3
|
|
4
|
|
6
|
|
8
|
Locate the Outputs section. In the table, enter the following settings:
|
|
9
|
Locate the Image section. Click
|
|
10
|
Click
|
|
2
|
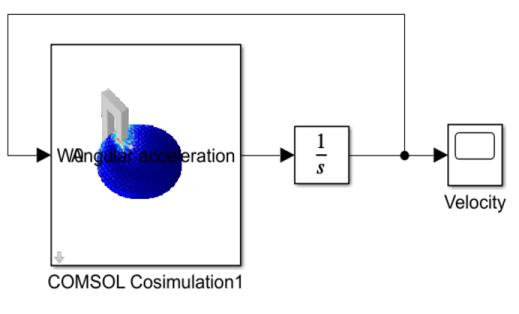
In MATLAB enter the command mphapplicationlibraries to start the GUI for viewing models from the LiveLink for Simulink application library.
|