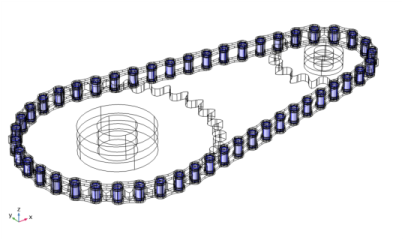
See the Chain Geometries section for details about various built-in geometries available in the COMSOL Part Library.
|
|
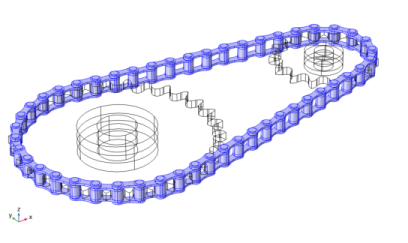
See the Chain Geometries section for details about various built-in geometries available in the COMSOL Part Library.
|
|
|
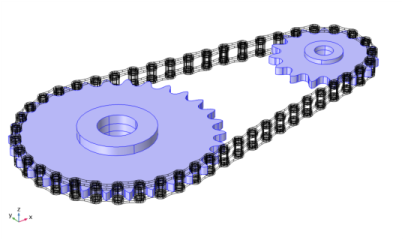
See the Chain Geometries section for more details about the selections available for different geometry parts.
|
|
|
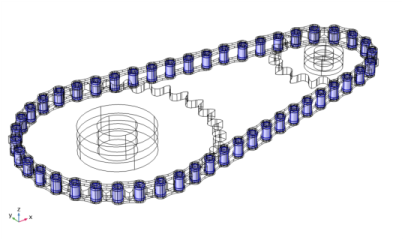
Note that this selection is at the same geometrical position as the Pin Outer Boundaries selection.
|
|
•
|
Only click the Create Links and Joints button after setting appropriate values for all parameters in the Chain Drive node.
|
|
•
|
If you change one or more parameters in the Chain Drive node after the automatic creation of physics nodes, the settings of the associated physics nodes also require updates. Click the Create Links and Joints button again in order to update the settings of the existing physics nodes. A warning message is added under the Chain Drive node to notify when such an update is required.
|
|
•
|
If any selections or related parameters in the Chain Drive node are modified after the automatic creation of physics nodes, all associated physics nodes needs to be recreated. Click the Create Links and Joints button again in order to do this. Since all physics nodes are deleted and created again during this operation, the update may take a while. A warning message is added under the Chain Drive node to notify when such an update is required.
|