The general form equation shown in Equation 16-1, as well as the coefficient form equation in
Equation 16-2, contain time-derivative terms of the same form. These terms only take effect for Time Dependent, Frequency Domain, Eigenvalue, and Eigenfrequency study steps, and derived versions of these. In a Frequency Domain study step, time derivatives are interpreted using the harmonic ansatz as
where f is the frequency given by the study step or specified under
Equation in the interface settings. In an Eigenvalue or Eigenfrequency study step, time derivatives are interpreted as
where λ is the eigenvalue. See
Solving Eigenvalue Problems. When solving a Stationary or similar study step, the solvers assume that all time derivatives are zero, so the values of the
ea and
da coefficients do not matter.
When solving a Time Dependent study step, the mass coefficient, ea, becomes important. The name mass coefficient, or
mass matrix in case of a system of equations, stems from the fact that in many physics applications,
ea contains the mass density. The
da coefficient in such equations usually represents damping of wave-like phenomena. However, if
ea = 0, then
da is often called the mass coefficient instead. The default settings are
ea = 0 and
da = 1, representing a parabolic time-dependent PDE such as the heat equation. Using
ea = 1 and
da = 0 represents an undamped wave equation.
If, for a system of equations, the ea matrix is nonzero and singular, or if
ea = 0 and
da is singular, the system becomes a
differential-algebraic equation (DAE) system. The COMSOL Multiphysics solvers for time-dependent problems handle DAEs.
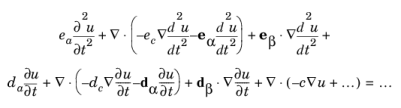
The coefficient forms in equation Equation 16-2 only contain coefficients for pure space and time derivatives up to second order. The only directly available time-derivative coefficients are therefore
ea and
da, using the subscript
a because they are similar to the
a coefficient in the absorption term, except that they multiply
∂2u/∂t2 and
∂u/∂t instead of
u. In analogy, it is possible to define coefficients
ec,
eα,
eβ and
dc,
dα,
dβ for mixed space-time derivatives, such that the equation becomes instead
simply add the terms -e_q*utt-d_q*ut to the
g term, and provide appropriate values or expressions for the coefficients
eq and
dq in, for example, a
Global Equations Settings window.