You are viewing the documentation for an older COMSOL version. The latest version is
available here
.
Axial Symmetry and Deformation
The axially symmetric geometry uses a cylindrical coordinate system. Such a coordinate system is orthogonal but curvilinear, and you can choose between a covariant basis
e
1
,
e
2
,
e
3
and a contravariant basis
e
1
,
e
2
,
e
3
when formulating the theory.
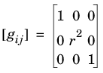
The metric tensor is
in the coordinate system given by
e
1
,
e
2
,
e
3
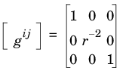
, and
in
e
1
,
e
2
,
e
3
.
The metric tensor plays the role of a unit tensor for a curvilinear coordinate system.
For any vector or tensor
A
, the metric tensor can be used for conversion between covariant, contravariant, and mixed components:
In both covariant and contravariant basis, the base vector in the azimuthal direction has a non-unit length. To cope with this issue, the so-called physical basis vectors of unit length are introduced. These are
The corresponding components for any vector or tensor are called physical.
For any tensor, the physical components are defined as
where no summation is done over repeated indices.
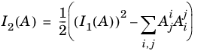
Mixed Components and Principal Invariants
The mixed tensor components are given by
The principal invariants are
Displacements and Axial Symmetry Assumptions
The axial symmetry implementation in COMSOL Multiphysics assumes independence of the angle, and also that the azimuthal component of the displacement is identically zero. The physical components of the radial and axial displacement,
u
and
w
, are used as dependent variables for the axially symmetric geometry.
Strains
The right Cauchy–Green deformation tensor is defined as
and the Green–Lagrange strain tensor is
Under the axial symmetry assumptions, the covariant components of
C
are
For geometrically linear analysis, drop the nonlinear terms inside square brackets in the above expressions.
The physical components of
ε
are
The volumetric strain is