
|
•
|
Qglobal is the global contribution to the objective function Q. It is given as one or more general global expressions, either in an Optimization study step or in a Global Objective node under an Optimization interface.
|
|
•
|
Qprobe is a probe contribution to the objective function Q. It is a probe objective so its definition is restricted to a point on a given geometrical entity. You specify the probe point used for the point evaluation explicitly in a Probe Objective node under an Optimization interface.
|
|
•
|
Qint,k is an integral contribution to the objective function Q. It is an integral objective so its definition is restricted to a set of geometric entities of the same dimension. Use an Integral Objective node under an Optimization interface to specify an integrand and a select a set of domains, boundaries, edges or points over which to integrate. For a point selection, the integration reduces to a summation.
|
|
|
The reason for this subdivision is computational. Each evaluation of an implicit constraint requires an up-to-date solution of the multiphysics solution u. The gradient-based optimization methods also require a complete sensitivity evaluation, which is computationally demanding; see Choosing a Sensitivity Method in the COMSOL Multiphysics Reference Manual.
|
|
•
|
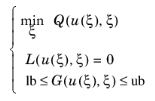
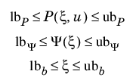
Bounds or control variable bounds are inequality constraints setting lower and upper bounds directly on each control variable degree of freedom. Hence, bound constraints correspond to constraints of the form lb ≤ ξ ≤ ub. They are handled efficiently by all solvers that support them and in many cases improve solver stability and efficiency.
|
|
•
|
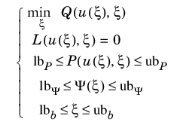
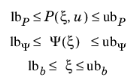
Pointwise inequality constraints are inequality constraints involving an explicit expression in terms of the control variables. This type of constraint sets lower and upper bounds on the expression for node points in a set of geometric entities of the same dimension.
|
|
•
|
Global inequality constraints set upper and lower bounds on a general global expression, possibly involving both the control variables and the PDE solution. Apart from the specification of bounds, a global inequality constraint is identical to a Global Objective.
|
|
•
|
Integral inequality constraints set upper and lower bounds on an integral of an expression, possibly involving the PDE solution and control variables, over a set of geometric entities of the same dimension. For integral inequality constraints on points, the integration reduces to a summation.
|
|
|