Morrow (Ref. 6) proposed an exponential fatigue relation in elastoplastic materials given by
where ΔWd is the range of the dissipated energy density during one cycle,
Nf is the number of load cycles until failure (one fatigue cycle consists of two reversals), and
Wf' and
m are material constants.
In the original work, ΔWd was taken as the range of the plastic dissipated density. This has been extended in the Fatigue Module where the Morrow model can be used with other dissipated energies, depending on the parameter
Energy type selected under
Fatigue Model Selection for the
Energy-Based node. The dissipated energy is evaluated according to
Table 3-5 where
ΔWc is the range of the creep dissipated energy density during one cycle and
ΔWp is the range of the plastic dissipated energy density during one cycle.
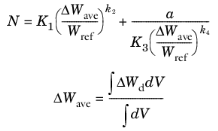
Darveaux (Ref. 7) relates fatigue life to a volume average of dissipated energy according to
where the first term in the equation represents the number of cycles necessary to initiate fatigue and the second term defines the number of cycles during crack growth. N is the number of cycles necessary to grow a crack until it has reached the size
a.
K1,
k2,
K3, and
k4 are material constants. The average dissipated energy density range
ΔWave is based on the dissipated energy density range
ΔWd that is evaluated over the material volume
V. The integration of the energy density reduces the sensitivity to meshing since singularities can be expected at sharp geometrical changes, corners, or domain interfaces. Phenomenologically this is explained by the fact that a crack propagates through a layer and the energy dissipated in that layer controls fatigue.
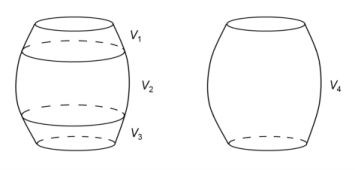
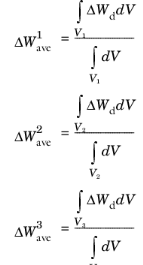
The computation of ΔWave is determined by the parameter
Volume integration. When
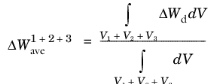
Individual domains is selected, the average value is calculated over each geometrical domain specified in the selection. When
Entire selection is selected, a single average value is calculated based on the dissipated energies in all domains in the selection. The difference between these two options is illustrated in
Figure 3-14, where two equal solder joints are shown. One of them is subdivided into three geometrical domains with volumes
V1,
V2, and
V3 while the second one consists of only one domain with volume
V4. Since both joints have the same dimensions,

.