|
|
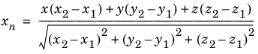
In the Truss interface, the coordinates are usually denoted with lowercase letters (x, y, z). If a Solid Mechanics or Membrane interface is present in the same model, then it becomes necessary to make a difference between the material frame and the spatial frame (Material and Spatial Coordinates). In this case the coordinates in the Truss interface change to (X, Y, Z).
|
|
•
|
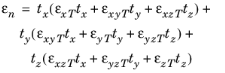
εn is the total axial strain
|
|
•
|
εn,el is the elastic axial strain
|
|
•
|
εinel is the sum of all inelastic strain contributions:
|
|
-
|
|
-
|
|
-
|
|
-
|
|
•
|
σex is the sum of all extra strain contributions:
|
|
-
|
|
-
|