The Layered Shell (lshell) interface (

), found under the
Structural Mechanics branch (

) when adding a physics interface, is used to model layered structural shells on 3D boundaries. Shells are thin flat or curved structures, having significant bending stiffness.
When this interface is added, these default nodes are also added to the Model Builder —
Linear Elastic Material,
Free (a boundary condition where edges are free, with no loads or constraints), and
Initial Values. Then, from the
Physics toolbar, add other nodes that implement, for example, boundary conditions. You can also right-click
Layered Shell to select physics features from the context menu.
The Label is the default physics interface name.
The Name is used primarily as a scope prefix for variables defined by the physics interface. Refer to such physics interface variables in expressions using the pattern
<name>.<variable_name>. In order to distinguish between variables belonging to different physics interfaces, the
name string must be unique. Only letters, numbers, and underscores (_) are permitted in the
Name field. The first character must be a letter.
The default Name (for the first physics interface in the model) is
lshell.
Here you select on which layers in a layered material that the physics interface should be active. By default, the Use all layers check box is selected. This means that all layers in all layered materials on the selected boundaries are used.
If you deselect the Use all layers check box, you can select individual layers within a single layered material. This is a seldom used option, since it means that the physics interface is restricted to the boundaries on which a specific layered material is defined.
From the Structural transient behavior list, select
Include inertial terms (the default) or
Quasi-static. Use
Quasi-static to treat the dynamic behavior as quasi-static (with no mass effects; that is, no second-order time derivatives). Selecting this option gives a more efficient solution for problems where the variation in time is slow when compared to the natural frequencies of the system. The default solver for the time stepping is changed from Generalized alpha to BDF when
Quasi-static is selected.
Enter the default coordinates for the Reference point for moment computation xref. The resulting moments (applied or as reactions) are then computed relative to this reference point. During the results and analysis stage, the coordinates can be changed in the
Parameters section in the result nodes.
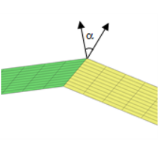
The fold-line limit angle α is the smallest angle between the normals of two boundaries that makes their intersection to be treated as a fold line. The normal to the layered shell is discontinuous along a fold-line. Enter a value or expression in the
α field. The default value is 0.05 radians (approximately 3°). The value must be larger than 0, and less than
π/2, but angles larger than a few degrees are not usually meaningful.
Enter a number between -1 and 1 for the Local z-coordinate [-1,1] for thickness-dependent results Z. The value can be changed from
−1 (downside) to
+1 (upside). The default is +1. A value of 0 means the midsurface of the layered shell. This is the default position for stress and strain evaluation during the results analysis.
In the Layered Shell interface you can choose not only the order of the discretization, but also the type of shape functions: Lagrange or
serendipity. For highly distorted elements, Lagrange shape functions provide better accuracy than serendipity shape functions of the same order. The serendipity shape functions will however give significant reductions of the model size for a given mesh containing hexahedral, prism, or quadrilateral elements. The default is to use
Quadratic Lagrange shape functions for the
Displacement field.
The physics interface uses the global spatial components of the Displacement field u as dependent variables. The default names for the components are (
u,
v,
w).