The COMSOL Multiphysics software refers to the spatial, material/reference, geometry, and mesh coordinate systems described above as spatial frame,
material frame (reference frame),
geometry frame, and
mesh frame, respectively. Physics can be formulated in the spatial frame or in the material frame, depending on whether it is more convenient to interpret the equations as Eulerian or Lagrangian, respectively. It is not possible to use the geometry and mesh frames and their associated coordinates to formulate physics because they are neither connected to the material nor to the true Euclidean space.
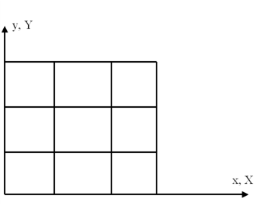
You can change these names in the Settings window of a Component. Initially, all frames coincide and their coordinates evaluate to the same value at any given point in the mesh; technically, the spatial, material and geometry coordinates are all aliases for the mesh coordinates.
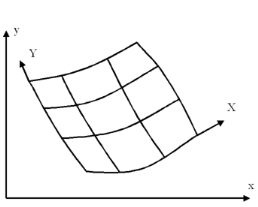
When a Moving Mesh feature is added to a component, or a structural mechanics interface is added and Include geometric nonlinearity is switched on in a study step, the spatial frame is separated from the material frame. From this point, spatial and material coordinates will evaluate differently at a given point in the mesh. Eulerian and Lagrangian formulations behave differently because they, among other things, define derivatives with respect to different sets of independent variables.