|
|
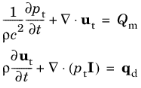
The equations solved in the Pressure Acoustics, Time Explicit interface are closely related to the equations solved in The Convected Wave Equation, Time Explicit Interface. There is no background flow option in the Pressure Acoustics, Time Explicit interface but, on the other hand, it uses a scattered field formulation that allows solving scattering problems.
|
|
•
|
|
•
|
If Viscous, Thermally conducting, or Thermally conducting and viscous is selected enter the fluid properties (see the Transient Pressure Acoustics Model for details). These three options will define the sound diffusivity δ through the classical material properties. The options are equivalent to defining the classical thermoviscous attenuation factor atv in the frequency domain.
|
|
•
|
If General dissipation is selected enter the speed of sound c, the density ρ, and the sound diffusivity δ. This option can be used for modeling fluids with measured damping properties.
|
|
•
|
If Ideal gas is selected enter the combination of material properties defining the gas.
|
|
|
For general information about the numerical flux see the Numerical Flux section under Wave Form PDE in the COMSOL Multiphysics Reference Guide.
|
|
|
For more detailed information about the filter see the Filter Parameters section under Wave Form PDE in the COMSOL Multiphysics Reference Guide.
|