|
•
|
Two principal curvature calculation help variables α1 and α2 and the rotation angle
|
|
•
|
|
•
|
The integral A of the attenuation coefficient along the ray path.
|
|
•
|
|
•
|
Two principal radii of curvature, r1 and r2, which represent the maximum and minimum radii of curvature of the intersection of the wavefront with an arbitrary plane.
|
|
•
|
Three components of a unit vector e1 in the direction corresponding to the first principal radius of curvature. This information is used to reinitialize the principal radii of curvature at curved boundaries.
|
|
•
|
The integral A of the attenuation coefficient along the ray path.
|
|
•
|
One radius of curvature r1 of the wavefront. All wavefronts are assumed to be converging or diverging cylindrical waves, so it is not necessary to define a second radius of curvature.
|
|
•
|
The integral A of the attenuation coefficient along the ray path.
|
|
•
|
Two principal curvature calculation help variables α1 and α2 and the rotation angle
|
|
•
|
The integral A of the attenuation coefficient along the ray path.
|

|
1
|
Given ni and ns, compute unit vectors in the directions of the reflected and refracted rays, nr and nt.
|
|
2
|
|
3
|
Compute the angle of rotation θ(i) needed to transform the local coordinate system with axes parallel to e1, e2, and ni to a local coordinate system with axes parallel to u0, ui, and ni. (Note: the superscript (i) is used to distinguish this coordinate system rotation angle from the angle of incidence of the ray, often denoted θi.)
|
|
4
|
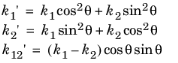
Transform the principal curvatures to the local coordinate system defined by u0, ui, and ni by using Equation 8-1, substituting θ(i) for θ.
|
|
5
|
Given the two principal curvatures of the surface, k1,s and k2,s with directions e1,s and e2,s, transform the curvature variables to a local coordinate system with axes parallel to u0, us, and ns. Let the new curvature variables be denoted by k1,s', k2,s', and k12,s'.
|
|
6
|
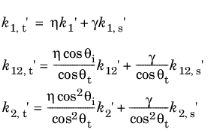
The curvatures of the wavefront and the surface have now been defined in coordinate systems that share the axis u0 and only differ by a rotation by the angle of incidence θi about u0. Defining the variables η and γ as in Material Discontinuity Theory, compute the curvature variables of the refracted ray in a coordinate system defined by u0, ut, and nt using the equations
|
|
7
|
Obtain the principal curvatures of the refracted ray by rotating the coordinate system defined by u0, ut, and nt by an angle θ(t) about nt. The angle θ(t) is defined as
|

|
9
|
Invert the principal curvatures to obtain the principal radii of curvature of the refracted ray. Rotate u0 about nt by the angle θ(t) to obtain the reinitialized principal curvature direction e1,t.
|
|
10
|
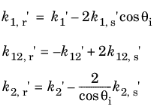
If a reflected ray is released, compute the curvature variables of the reflected ray in a coordinate system defined by u0, ur, and nr using the equations
|
|
11
|
Obtain the principal curvatures of the reflected ray by rotating the coordinate system defined by u0, ur, and nr by an angle θ(r) about nr. The angle θ(r) is defined as
|

|
13
|
Invert the principal curvatures to obtain the principal radii of curvature of the reflected ray. Rotate u0 about nr by the angle θ(r) to obtain the initialized principal curvature direction e1,r.
|