The amplitude of the small pressure variations that can be detected by the human ear vary from roughly 2·10-5 Pa at the hearing threshold to 20 Pa for jet engine noise. The amplitude at normal speech levels is about 0.02 Pa. The amplitudes described here are often given on a the logarithmic decibel scale, relative to the hearing threshold value of 2·10
-5 Pa, in units of dB SPL.
The frequency f (SI unit: Hz = 1/s) is the number of vibrations (pressure peaks) perceived per second and the wavelength
λ (SI unit: m) is the distance between two such peaks. The speed of sound
c (SI unit: m/s) is given as the product of the frequency and the wavelength,
c = λf. It is often convenient to define the angular frequency
ω (SI unit: rad/s) of the wave, which is
ω = 2πf, and relates the frequency to a full 360
o phase shift. The wave number
k (SI unit: rad/m) is defined as
k = 2π/λ. The wave number, which is the number of waves over a specific distance, is also usually defined as a vector
k, such that it also contains information about the direction of propagation of the wave, with
|k| = k. In general, the relation between the angular frequency
ω and the wave number
k is called the dispersion relation; for simple fluids it is
ω/
k =
c.
where t is time (SI unit: s),
ρ0 is the density of the fluid (SI unit: kg/m
3), and
c is the (adiabatic) speed of sound (SI unit: m/s).
where the spatial p(
x) and temporal
sin(
ωt) components are split. The pressure may be written in a more general way using complex variables
where the actual (instantaneous) physical value of the pressure is the real part of Equation 1. Using this assumption for the pressure field, the time-dependent wave equation reduces to the well-known Helmholtz equation
where P0 is the wave amplitude, and it is moving in the
k direction with angular frequency
ω and wave number
k = |
k|.
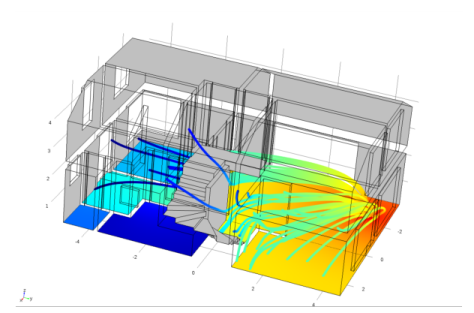
In most practical situations, an exact analytical solution to Equation 2 does not exist. Solving the equation requires a numerical approach using simulations.
As mentioned, solving the governing equations for the acoustic problems analytically — like, for example, the Helmholtz equation (Equation 2) — is only possible in a few simple situations. In order to solve real-life industrial problems, which can very well be multiphysics problems involving several coupled physics, numerical methods are necessary. This is the job of COMSOL Multiphysics. In the Acoustics Module, most of the physics interfaces are based on the finite element method (FEM). In order to extend the range of models that can be solved, the Acoustics Module also includes the Pressure Acoustics, Boundary Elements interface based on BEM, two interfaces based on the discontinuous Galerkin (dG-FEM) method, and Ray Acoustics that uses a ray tracing method.
When working with acoustics in the frequency domain, that is, solving the Helmholtz equation, only one time scale T exists (the period) and it is set by the frequency,
T =
1/f. Several length scales exist: the wavelength
λ =
c/
f, the smallest geometric dimension
Lmin, the mesh size
h, and the thickness of the acoustic boundary layer
δ (the latter is discussed in
Models with Losses). In order to get an accurate solution, the mesh should be fine enough to both resolve the geometric features and the wavelength. As a rule of thumb, the maximal mesh size should be less than or equal to
λ/
N, where
N is a number between 5 and 10, and depends on the spatial discretization.
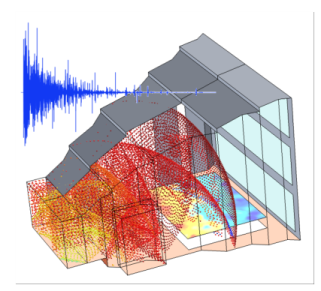
For transient acoustic problems the same considerations apply. However, several new time scales are also introduced. One is given by the frequency contents of the signal and by the desired maximal frequency resolution: T =
1/ fmax. The other is given by the size of the time step
Δt used by the numerical solver. A condition on the so-called CFL number dictates the relation between the time step size and the minimal mesh size
hmin, The CFL number is defined as
where c is the speed of sound in the system. For all the transient interfaces available with the Acoustics Module the solver is automatically set up to meet the CFL criterion. The user is only required to enter the maximal frequency
fmax to be resolved by the model.
where μ is the dynamic viscosity,
k is the coefficient of thermal conduction, and
Cp is the specific heat capacity at constant pressure. These two length scales define an acoustic boundary layer that needs to be resolved by the computational mesh.