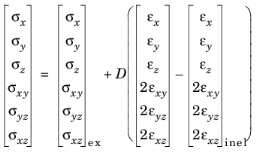
where  is the 4th order elasticity tensor
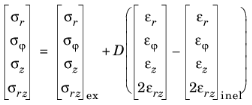
is the 4th order elasticity tensor, “:” stands for the double-dot tensor product (or double contraction). The elastic strain
εel is the difference between the total strain
ε and all inelastic strains
εinel. There may also be an extra stress contribution
σex with contributions from initial stresses and viscoelastic stresses. In case of geometric nonlinearity, the second Piola-Kirchhoff stress tensor and the Green-Lagrange strain tensor are used.
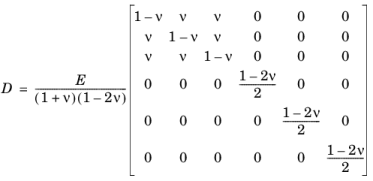
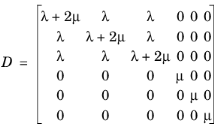
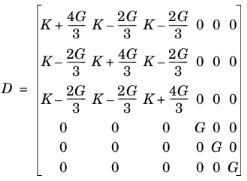
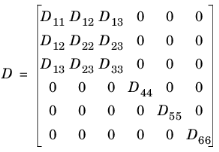
According to Table 3-1, the elasticity matrix
D for isotropic materials is written in terms of Lamé parameters
λ and
μ,
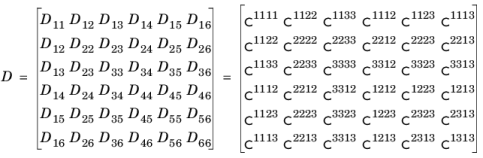
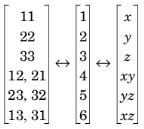
Beside the Standard (XX, YY, ZZ, XY, YZ, XZ) Material data ordering, the elasticity coefficients can be entered following the
Voigt notation. In the
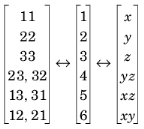
Voigt (XX, YY, ZZ, YZ, XZ, XY) Material data ordering, the sorting of indices is:
The elasticity matrix for orthotropic material in the Standard (XX, YY, ZZ, XY, YZ, XZ) Material data ordering has the following structure:
The values of Ex,
Ey,
Ez,
νxy,
νyz,
νxz,
Gxy,
Gyz, and
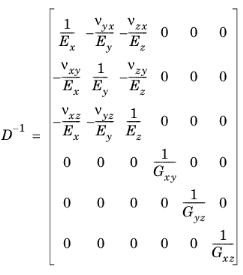
Gxz are supplied in designated fields in the physics interface. COMSOL Multiphysics deduces the remaining components—
νyx,
νzx, and
νzy—using the fact that the matrices
D and
D−1 are symmetric. The
compliance matrix has the following form:
The elasticity matrix in the Voigt (XX, YY, ZZ, YZ, XZ, XY) Material data ordering changes the sorting of the last three elements in the elasticity matrix:
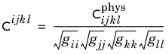
The user input D matrix always contains the physical components of the elasticity tensor
where λ and
μ are the first and second Lamé elastic parameters and
g is the metric tensor.
where the strain energy density Ws(ε, T) is given by
Equation 3-12. Hence, the stress can be found as
where T0 is a reference temperature, the volumetric heat capacity
ρCp can be assumed to be independent of the temperature (Dulong-Petit law), and the elastic entropy is
where α is the thermal expansion coefficient tensor. For an isotropic material, it simplifies into
where k is the thermal conductivity matrix, and the heat source caused by the dissipation is
where  is the strain-rate tensor and the tensor τ
is the strain-rate tensor and the tensor τ represents all possible inelastic stresses (for example, a viscous stress).
In many cases, the second term can be neglected in the left-hand side of Equation 3-13 because all
Tαmn are small. The resulting approximation is often called uncoupled thermoelasticity.