|
1
|
|
2
|
|
4
|
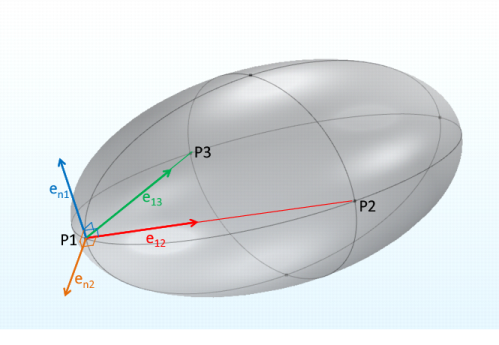
This normal is perpendicular to the line between p1 and p2. Compute a second perpendicular direction, orthogonal to en1.
|
|
6
|
Constrain the second point p2 in two directions, so that all possible rotations except around the line e12 are suppressed:
|

|
7
|
Constrain the third point p3 so that the remaining rotation is suppressed:
|