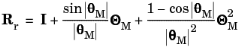
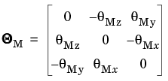
The rigid rotation is then represented by a rotation matrix Rr, corresponding to this midpoint rotation. It is given by
where the local coordinate ξ ranges from 0 to 1, and
Xi denotes original node coordinates.
xM is the midpoint position, computed as the average of the two nodes,
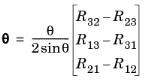
The total rotation vector is computed from a total rotation matrix, R. The total rotation matrix is first composed from the rigid body rotation and the incremental rotation.