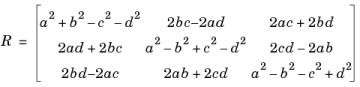
In 3D the situation is more complex. There are three rotational degrees of freedom. For finite rotations, however, any choice of three rotation parameters is singular at some specific set of angles. For this reason, a four-parameter quaternion representation is used for the rotations in the joints. The quaternion parameters are called
a,
b,
c, and
d, respectively. These four parameters are not independent, so an extra equation stating that the following relation is added:
The parameter a can thus be considered as measuring the rotation, while
b,
c, and
d can be interpreted as the orientation of the rotation vector. For small rotations, this relation simplifies to