COMSOL Multiphysics refers to the spatial, material/reference, geometry, and mesh coordinate systems described above as
spatial frame,
material frame (reference frame),
geometry frame, and
mesh frame, respectively. Physics can be formulated on the spatial frame or on the material frame, depending on whether it is more convenient to interpret the equations as Eulerian or Lagrangian, respectively. It is not possible to use the geometry and mesh frames and their associated coordinates to formulate physics because they are neither connected to the material nor to the true Euclidean space.
Conceptually, all four frames always exist, but all or some of them can point to the same actual coordinate system. It is the actual coordinate system that decides the names of the independent variables (the coordinate names like x,
y,
z or
r,
phi,
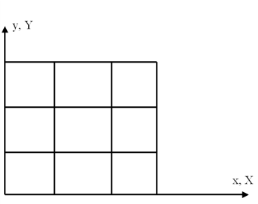
z). Before adding a Moving Mesh or Deformed Geometry interface to a Component, all four frames coincide and use the spatial coordinate names. Also all physics interfaces based on solid mechanics include moving mesh functionality and by default behave much in the same way as a Moving Mesh interface.
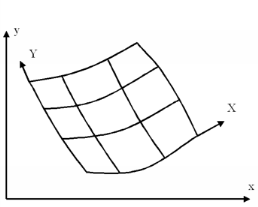
When a Moving Mesh or Solid Mechanics interface is added, the spatial frame is separated from the material frame, which is given a new set of independent variable names (by default capital X,
Y,
Z or
R,
PHI,
Z). From this point, Eulerian and Lagrangian formulations behave differently because they, among other things, define derivatives with respect to different sets of independent variables.
The geometry frame and the material frame use the same coordinate system until a Deformed Geometry interface is added. At that point, a new geometry coordinate system is created and given a new set of independent variable names (by default Xg,
Yg,
Zg or
Rg,
PHIg,
Zg). The new geometry frame refers to the geometry as it is represented by the Geometry Sequence. By inserting a nontrivial transformation from geometry coordinates to material coordinates, the shape of the geometry can be effectively changed without having to create a new mesh. This can be useful as a means of parameterizing the geometry, for example, before performing optimization or sensitivity analysis.