Use a Rotated System (

) to define rotation about the out-of-plane axis in 2D and Euler angles in 3D.
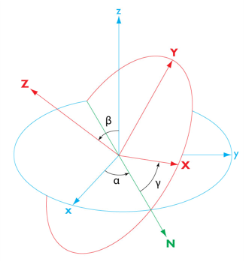
In the Settings window for
Rotated System define the rotation relative to the global Cartesian coordinate system. In 3D models, you specify the local coordinate system (
xl,
yl,
zl) using three consecutive Euler angles (rotation angles)
α,
β, and
γ. See
Figure 5-4.
If this coordinate system is added as a subnode to a Combined System node, define where it will be active using a selection in the
Geometric Entity Selection section. Also, the
Name and
Coordinate names fields are not available in this case.
In the Coordinate names table, the default names are entered —
x1,
x2, and
x3. In planar 2D models,
x1 and
x2 are typically the in-plane coordinates, and
x3 is the out-of-plane coordinate.
For 2D models, select an out-of-plane axis from the Out-of-plane axis list (first, second, or third coordinate direction into or out-of screen), and then if necessary adjust the base vectors in the table under
Base vectors. Enter the
Rotation about out-of-plane axis (in radians). The default is 0.
For 3D models, enter the Euler angles (Z-X-Z) (in radians) in the
α,
β, and
γ fields (see the graphics in the
Settings window for definitions of these angles). The default values are 0 for all angles.
From the Work plane list, select
xy-plane (the default, for a standard global Cartesian coordinate system) or select any work plane in the geometry sequence. If you choose a work plane, the work plane’s coordinates
xw,
yw, and
zw are used for the definition of the rotated system.
