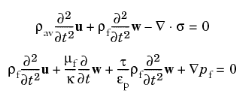
here, u is the displacement of the porous material,
σ is the total stress tensor (fluid and porous material),
w is the fluid displacement with respect to the porous matrix,
ρf and
μf are the fluid’s density and viscosity,
τ is the tortuosity,
εp is the porosity,
pf is the fluid pore pressure,
κ is the permeability and
ρav the average density. The average density is the total density (porous material plus pore fluid)
ρav = ρd + εpρf.
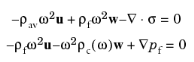
Assuming a time-harmonic dependency for the variables, u(x,t) = u(x)eiωt,
w(x,t) = w(x)eiωt, the time derivatives can be removed, so the system in
Equation 3-2 becomes
here, the complex density ρc(
ω) (
Ref. 5) accounts for the tortuosity, porosity and fluid density, and the viscous drag on the porous matrix
At low frequencies or for small pore sized the flow profile inside the pores can be assumed to be Poiseuille like. In this case the viscosity in Equation 3-4 effectively has a constant value. For increasing frequency the profile changes and a frequency dependent correction factor needs to be taken into account. This is done by selecting the
Biot’s high frequency range option from the
Viscosity model list. In this case
Equation 3-4 is implemented with a frequency-dependent viscosity
μc(
f) (
Ref. 2,
Ref. 3,
Ref. 5)
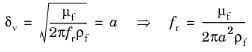
here, fr is a reference frequency (SI unit: Hz) which determines the low-frequency range
f << fr and the high-frequency range
f >> fr.
The reference frequency fr can be interpreted as the limit when viscous forces equal inertial forces in the fluid motion. In pore with characteristic size
a this happens when the viscous penetration depth is equal to the pore radius.
here, T(
Θ) is related to the Kelvin functions
Ber(
Θ) and
Bei(
Θ)
and J0 and
J1 are Bessel functions of the first kind. This expression can be recognized as the loss terms in
Zwikker-Kosten like equivalent fluid models (Derivation of the equivalent bulk modulus valid for any fluid in the Zwikker-Kosten theory) or the loss models for cylindrical waveguides in the narrow region acoustics or LRF models (About the Narrow Region Acoustics Models) models.
The formulation in terms of the displacements u and
w is not optimal from the numerical viewpoint, since it requires to solve for two displacement fields (
Ref. 7,
Ref. 8,
Ref. 9). The Poroelastic Waves interface solves for the fluid pore pressure variable
pf instead of the fluid displacement field
w.
The total stress tensor σ is then divided into the contributions from the elastic porous (drained) matrix and from the pore fluid
here, the identity tensor I means that the pore pressure
pf only contributes to the diagonal of the total stress tensor
σ. The parameter
αB is the so-called Biot-Willis coefficient. The drained, elastic stress tensor is written as
σd = c:ε when
ε is the strain tensor of the porous matrix, and the elasticity tensor
c contains the drained porous matrix’s elastic properties (see the Linear Elastic Material feature in the
Structural Mechanics Module User’s Guide).
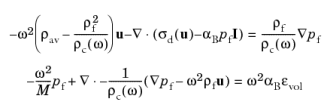
Finally, arrange Equation 3-5 in terms of the variables
u and
p:
Biot’s modulus M is calculated from the porosity
εp, fluid compressibility
χf, Biot-Willis coefficient
αB and the drained bulk modulus of the porous matrix
Kd
and Biot’s wave equations (Equation 3-6 and
Equation 3-9) can be written in terms of the variable
u and
pf as
Further arranging the first row in Equation 3-10 to fit the formulation in the Elastic Waves interface (
Equation 3-1) gives
The body load F depends on the angular frequency and the gradient of fluid pressure and the fluid pressure acts as a spherical contribution to the diagonal of Cauchy stress tensor
Arranging the second row in Equation 3-10 to fit the implementation of the Pressure Acoustics, Frequency Domain interface gives (see
Theory Background for the Pressure Acoustics Branch)
The monopole domain source Qm (SI unit: 1/s
2) and the dipole domain source
qd (SI unit: N/m
3) depend on the angular frequency
ω, the displacement of the porous matrix
u, the fluid density and Biot-Willis coefficient
αB
When both thermal and viscous losses are included the viscosity in Equation 3-4 and the fluid compressibility in
Equation 3-8 are replaced by frequency dependent expressions. The losses due to viscosity are considered by the viscosity expression and the losses due to thermal conduction by the fluid compressibility expression, see
Ref. 9.
where the viscous characteristic length Lv has been introduced (it is sometimes referred to as
Λ). The frequency dependent complex fluid compressibility is given by
where the thermal characteristic length Lth has been introduced (it is sometimes referred to as
Λ’). The two expressions can be recognized in the JCA equivalent fluid model (
Johnson-Champoux-Allard (JCA)) available in Pressure Acoustics.